
데이터가 아닌
행동을 학습하다
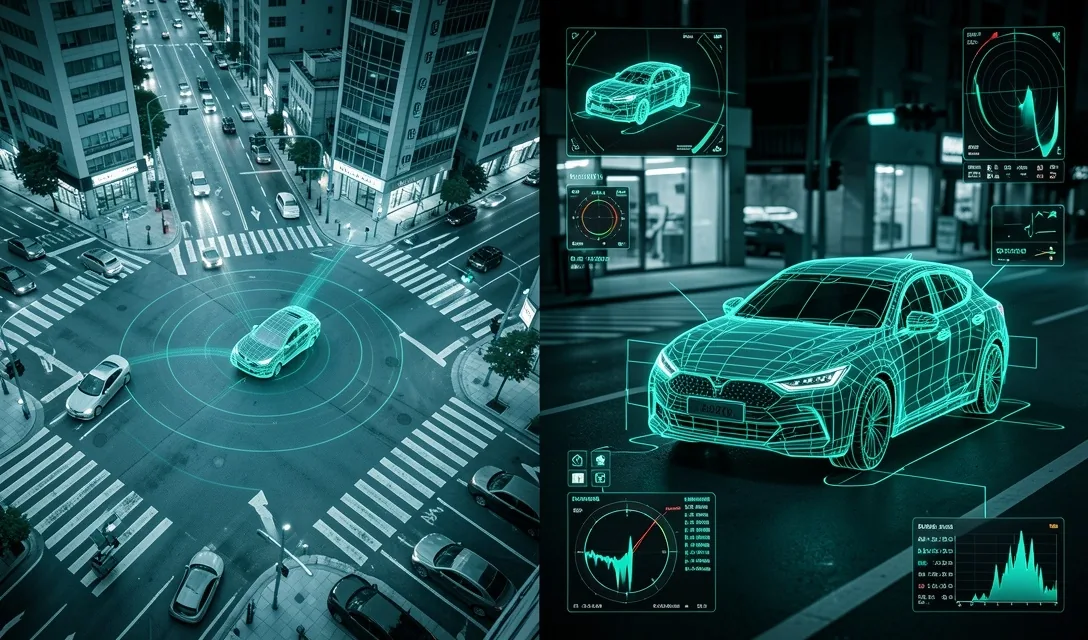
유비아노 디지털의 연구는 정적 알고리즘의 한계를 넘는 것에 집중합니다. 우리는 한국 도심의 복잡한 교통 논리 속에서 인공지능이 인간의 직관과 유사한 자연스러운 판단을 내릴 수 있도록 심층 강화학습모델을 고도화합니다.

Scientific Goal
단순한 경로 생성을 넘어, 보행자의 미세한 움직임과 신호 변화 사이의 가변적 관계를 이해하는 '보상 함수(Reward Function)' 엔지니어링의 정점을 지향합니다.
연구 개발의 세 가지 기둥
Sim2Real Transfer
가상 환경에서 학습된 에이전트가 현실 세계의 예기치 못한 물리 현상에서도 동일한 성능을 발휘하도록 간극을 좁히는 고도의 시뮬레이션 기술입니다. 광교 테크노벨리 기반의 정밀 로드 데이터를 활용합니다.
기술 분석 중Multi-Agent RL
다수의 자율주행 객체가 서로의 움직임을 예측하고 협력하는 지능형 교통 체계를 구축합니다. 혼잡한 도심 교차로에서의 병목 현상을 해결하는 핵심 엔진입니다.
Sensor Fusion Optimization
라이다, 레이더, 카메라는 각각의 한계가 있습니다. 유비아노 디지털은 강화학습을 통해 각 센서의 신뢰도를 실시간으로 평가하고 최적의 데이터를 선택적으로 통합하는 알고리즘을 연구합니다.
- 악천후 데이터 보정 알고리즘
- 엣지 컴퓨팅 기반 저지연 처리

Methodology
Safety-Critical Guardrails
우리의 연구는 혁신만큼이나 안전에 무게를 둡니다. 강화학습 에이전트가 제안하는 모든 주행 경로는 결정론적(Deterministic) 안전 레이어를 통과해야 합니다. 이 '이중 레이어' 구조는 AI의 창의성과 엔지니어링의 신뢰성을 동시에 확보합니다.
환경 분석 및 데이터 수집
국내 도로 환경에 최적화된 하드웨어 스펙과 경로 데이터를 수집하여 정밀한 모델링의 기초를 마련합니다.
심층 강화학습 모델 구축
특정 보상 함수를 기반으로 에이전트의 행동을 학습시켜 인간 특유의 직관적인 판단력을 시스템에 이식합니다.
Benchmark Comparison
Rule-based vs. Reinforcement Learning
전통적인 규칙 기반 시스템은 예측 불가능한 돌발 상황(무단 횡단, 불법 주정차 등)에서 한계를 보입니다. 유비아노의 RL은 수백만 번의 시뮬레이션을 통해 최선의 회피 및 대응 시나리오를 스스로 학습합니다.
기술 통합 관련 FAQ
기술 백서: 도심 자율주행을 위한 강화학습 응용
유비아노 디지털 연구진이 편찬한 최신 기술 백서를 통해 당사의 고유한 알고리즘 설계 철학과 시뮬레이션 벤치마크 데이터를 확인하십시오. 본 백서는 Urban Autonomous RL의 논문 요약을 포함하고 있습니다.
기술 백서 다운로드 요청학술 협력 및 연구 문의
유비아노 디지털은 윤리적 AI 개발과 기술 혁신을 위해 대학 및 연구 기관과의 긴밀한 협력을 환영합니다. RL의 경계를 함께 넓혀갈 인재와 파트너를 기다립니다.
Technical Consultation
R&D Center
+82-31-218-7640